


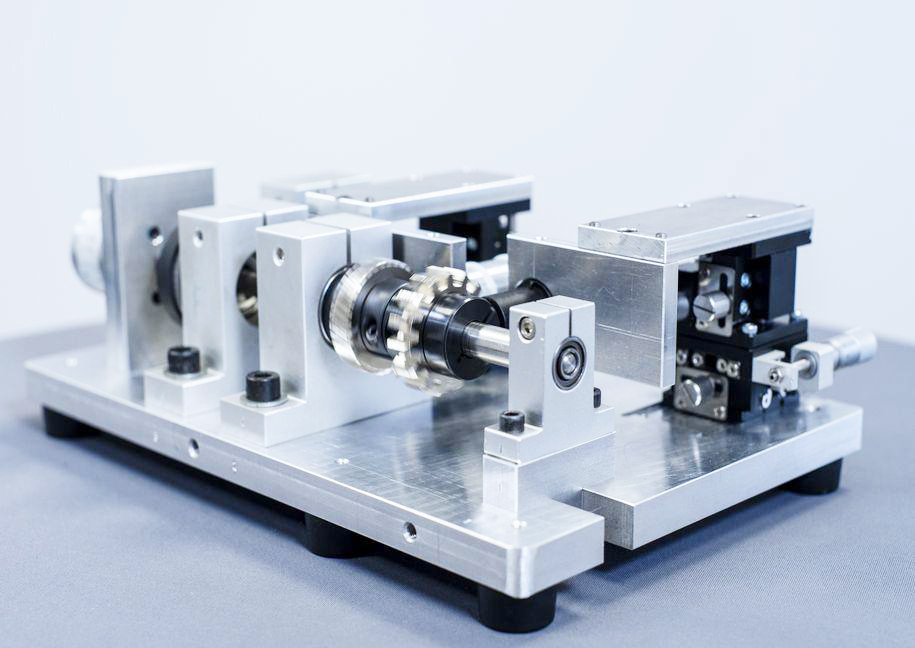
Encoder
Antrieb +/-5000 1/min
Geberrad 1
Geberrad 2
Sensor 1
Sensor 2
xyz-Verstellung 1
xyz-Verstellung 2
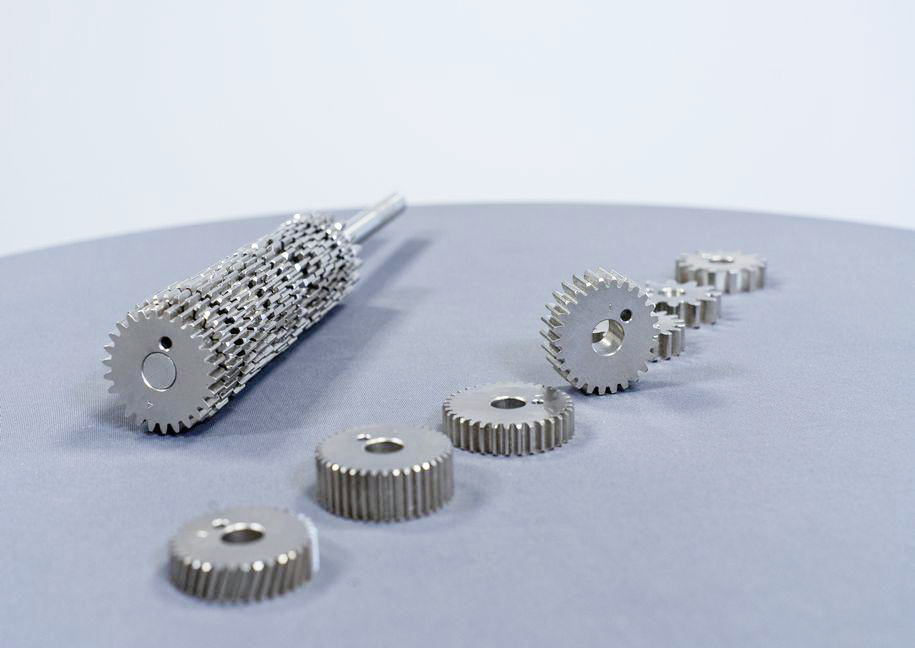
Modul 1 schrägverzahnt
Modul 1
Modul 1,25
Modul 1,5
Modul 2
Modul 2,5
Modul 3
Encoder
Antrieb +/-5000 1/min
Geberrad 1
Geberrad 2
Sensor 1
Sensor 2
xyz-Verstellung 1
xyz-Verstellung 2
Modul 1 schrägverzahnt
Modul 1
Modul 1,25
Modul 1,5
Modul 2
Modul 2,5
Modul 3
